Als Roboter in den USA: Eine etwas andere Konferenzteilnahme
Wie kann man an einer Konferenz teilnehmen, wenn man weite Entfernungen und große Kosten nicht auf sich nehmen möchte? Telepräsenz-Roboter machen es möglich. Hier ein Erfahrungsbericht von Dr. Athanasios Mazarakis.
Die ACM CHI Konferenz (kurz: CHI) ist die weltgrößte und bedeutendste Konferenz im Bereich Mensch-Computer-Interaktion. Dieses Jahr fand die Konferenz unter dem Motto “#chi4good” in San Jose, Kalifornien vom 7. bis 12. Mai statt. Die Arbeitsgruppe Web Science von Prof. Isabella Peters war mit zwei Workshop-Einreichungen erfolgreich vertreten:
- Crowd Dynamics: Exploring Conflicts and Contradictions in Crowdsourcing zusammen mit Kolleginnen und Kollegen aus Schweden, USA, Großbritannien und Deutschland.
- Following User Pathways: Cross Platform and Mixed Methods Analysis in Social Media Studies zusammen mit Kolleginnen und Kollegen aus Großbritannien, Dänemark und Deutschland.
In die Konferenz beamen
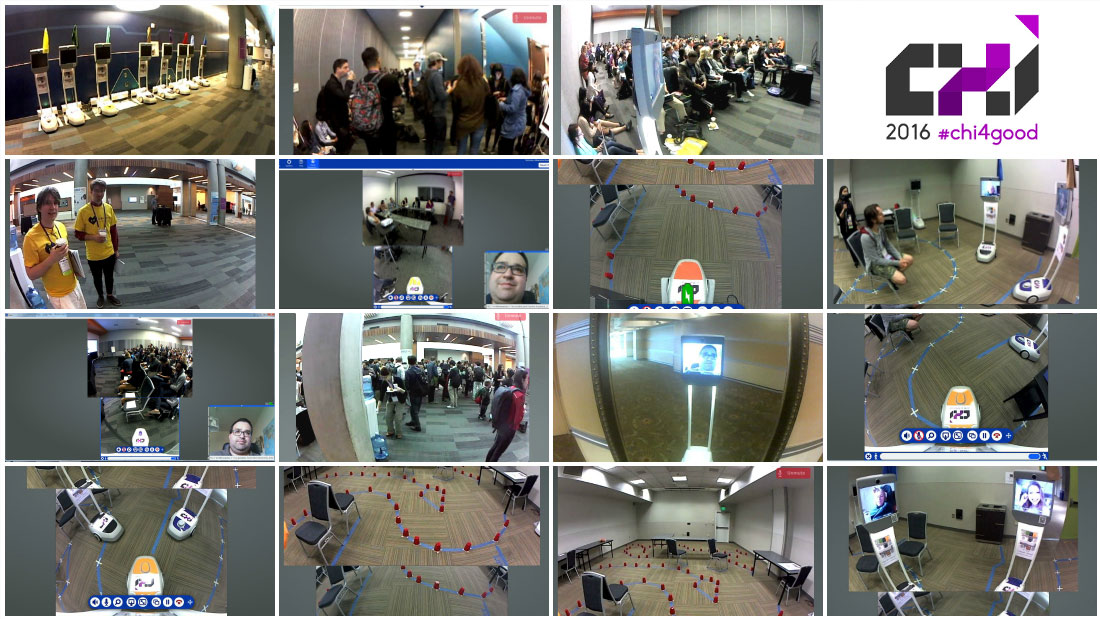
Leider sind solche Konferenzen sehr zeitintensiv und kostspielig, insbesondere wenn es um eine so prestigeträchtige Konferenz wie diese in den USA geht. Da außerdem Terminkonflikte mit der Science 2.0 Konferenz in Köln vorhanden waren, bot sich eine sehr interessante und kostengünstige Möglichkeit an, vor Ort in San José zu sein, ohne hinfliegen zu müssen: Und zwar als Telepräsenz Roboter! Wer die Serie Big Bang Theory kennt, der kennt diese Roboter vielleicht schon. Insgesamt waren mehr als 3.000 Personen auf der CHI vor Ort – und 10 Roboter, welche abwechselnd von circa 20-30 Forscherinnen und Forschern benutzt wurden, die sich dafür zuvor beworben hatten.
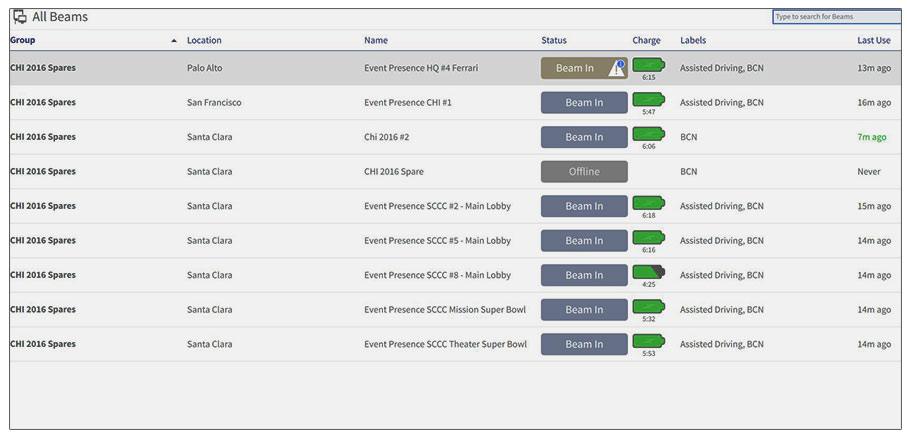
Begonnen hat alles mit einem 30-minütigen Training am Tag vor Konferenzbeginn. Zuerst wurde ein Roboter, ein sogenannter “Beam”, ausgesucht:
Danach sah man das Userinterface und die Übertragungen der Webcams.
So sah das Ganze aus:

Nächtliche Trainingseinheiten
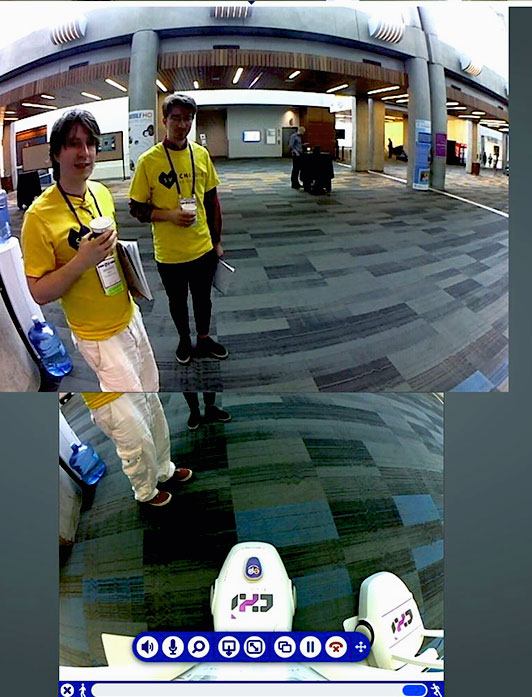
Unten ist der Nahbereich dargestellt, damit nichts umgefahren wird. Oben sieht man in die Ferne, das eigene Bild wird rechts unten angezeigt. Gesteuert wird entweder mit der Tastatur (was zu bevorzugen ist) oder Maus. Außerdem gibt es einen Turbomodus, mit dem der Beam deutlich schneller fahren kann – bei knapp 4 Stundenkilometern ist dann aber auch Schluss.
Und so sah das Ganze im Spiegel aus:

Das Training vorab war sehr wichtig, da die Steuerung etwas gewöhnungsbedürftig ist. Computerspielkenntnisse waren hier von Vorteil.
Nach dem Training bestand die Möglichkeit ein bisschen herumzufahren und das Gelernte praktisch anzuwenden. Ich habe diese Möglichkeit nachts genutzt, als die anderen Beams friedlich schliefen.

Auf Hilfe angewiesen
Insgesamt war der Aufwand für die Konferenz durchaus hoch: Das Tagungsgebäude bestand aus drei Stockwerken, sodass oft ein Aufzug genutzt werden musste – Treppen jeglicher Art wie auch Türen stellten ein unüberwindbares Hindernis dar. Und auch für den Aufzug selbst war immer Hilfe nötig, welche die gelb-gekleideten studentischen Hilfskräfte gerne leisteten. Anders wäre es nicht möglich gewesen, da zum Beispiel im Aufzug oft das WLAN-Signal abgebrochen ist und der Beam rausgeschoben werden musste.
Die Fahnen an der Seite der Beams waren ein wichtiges Merkmal, damit man auch durch andere identifiziert werden konnte. Für technische Schwierigkeiten und die allgemeine Koordination hatten die Veranstalter einen Skype Backchannel erstellt – dieser war sehr hilfreich, um in Notsituationen zu helfen, also zum Beispiel, wenn mal wieder kein WLAN vorhanden oder man vielleicht umgekippt war – dann konnte der Beam nicht mehr weiterfahren.
Am Samstag und Sonntag war Workshop-Zeit auf der CHI. Diese fanden in sehr kleinen und engen Räumen statt und es gab kaum Spielraum zum Bewegen. Das war nicht schlimm, denn auch bei physischer Anwesenheit bewegt man sich auf einer Konferenz ja auch nur in den Pausen.
Eine Impression zu einem Workshop vermittelt das folgende Bild:

Zeitgleich in zwei Zeitzonen arbeiten
Unsere Workshops waren erfolgreich, allerdings konnte ich bedingt durch die Zeitverschiebung nur bis zum Mittagessen (Ortszeit) bleiben – hier war es dann schon 23 Uhr. Richtig unangenehm wurde es, als die letzten Sessions um 1:00 Uhr nachts begannen und bis kurz nach 3:00 Uhr gingen. Insbesondere, weil ich am nächsten Tag normal an der Uni war, um meine Lehre zu leisten und an der ZBW zum Arbeiten. Die kurzfristige Doppelbelastung von Arbeit am Vormittag und Konferenz am Abend bzw. in der Nacht war zu spüren. Mit entsprechend großzügigen Pausen war dies aber durchaus machbar.
Während es am Samstag und Sonntag eher beschaulich zuging, sollte es sich ab Montag stark ändern, da deutlich mehr Teilnehmende als an den Workshop-Tagen erwartet wurden.
Auch in den Tagungsräumen war es sehr voll. Hier sieht man auch einen anderen Roboter.

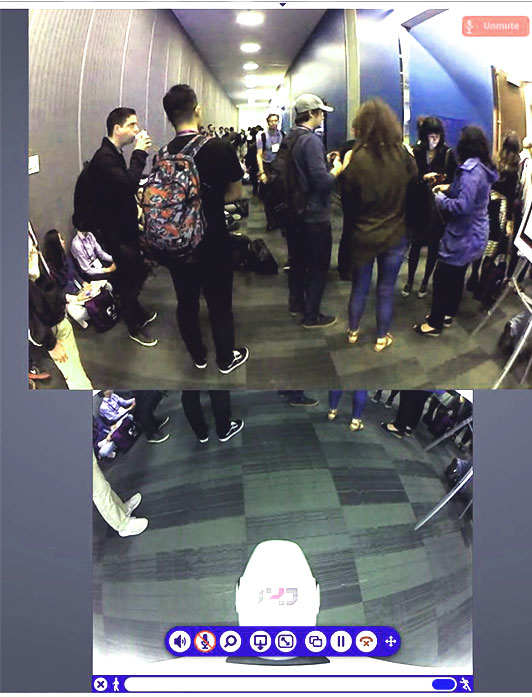
Berühmt wider Willen
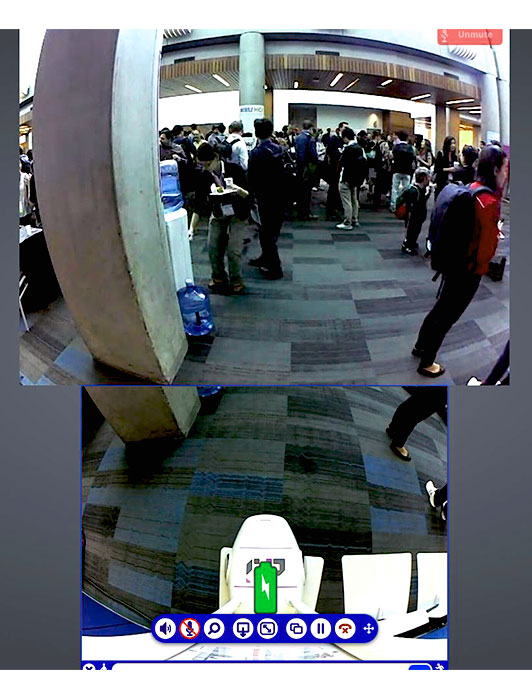
Man konnte auch miteinander kommunizieren, was sehr interessant war. Allerdings war der Neuigkeitsfaktor doch sehr hoch – ich weiß nicht, wie oft ich fotografiert und gefilmt wurde. Teilweise sind mir Menschen hinterhergerannt, um von mir ein Foto zu machen. Als Wissenschaftler war es nicht mein Ziel berühmt und ein Star zu werden – als Roboter war ich es dann (leider) doch, denn der Beam ist zwangsläufig auffällig. Während man auf freier Fläche relativ schnell mit 3-4 Stundenkilometern fahren konnte, so war bei solchen Menschenansammlungen nur im Schneckentempo möglich:
Die Bild- und Audioqualität war aus der Nähe sehr gut, allerdings hat trotz Dreifachzooms die Qualität gelitten, wenn man sich Folien anschauen wollte:
Als Roboter unterwegs viel Zeit einplanen
Man musste mindestens 20 Minuten, besser 30 Minuten, vorher losfahren, um im gewünschten Raum anzukommen – und sich auf den drei Etagen zu orientieren. Und am Ende konnte der Beam erst als Letzter den Raum verlassen, wenn alle Ladekabel eingepackt und die Durchgänge wieder frei waren. Ein Wechseln während den einzelnen Tracks war damit leider unmöglich. Das war aber auch besser so, denn die Akkuleistung hielt leider nur maximal 5-6 Stunden, angegeben waren 8 Stunden. Da hieß es dann schnell wieder aufladen gehen.
Am letzten Tag gab es noch eine Fokusgruppe mit einigen Beam-Teilnehmenden und dem Organisationsteam. Hierbei wurden auch Schwierigkeiten und Vorzüge bei der Nutzung der Beams besprochen. Die Besprechung fand um 8 Uhr Ortszeit statt, also 17 Uhr unserer Zeit. Dementsprechend waren weniger Beams vorhanden.

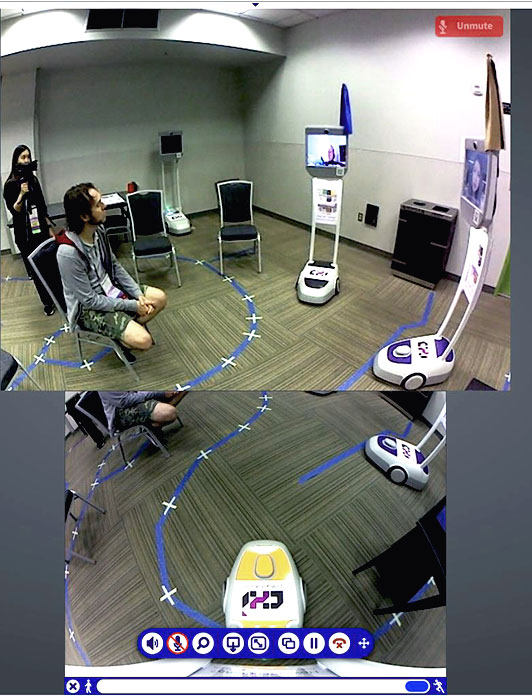
Wettfahren der Roboter
Was nett vom Organisationsteam war und einem seine Fahrkünste aufzeigte: Es wurde uns eine Rennstrecke zur Verfügung gestellt.
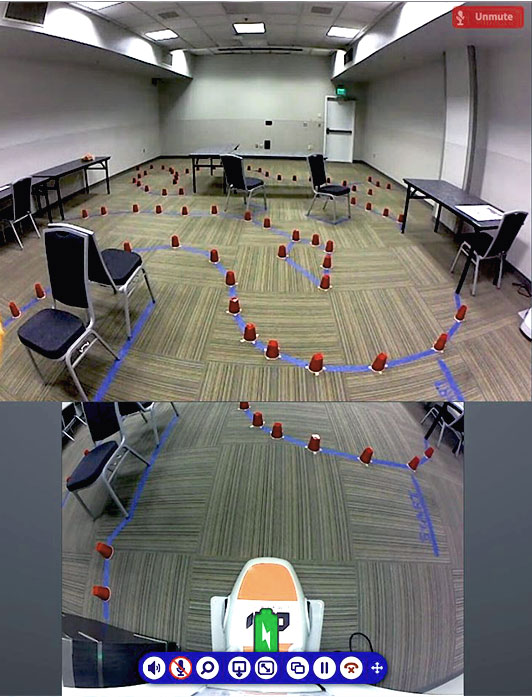
Die Rennstrecke hatte es in sich und man wurde für jede Berührung von Tisch, Bechern oder Stühlen mit Strafsekunden bestraft. Ich muss zugeben, ich habe mich ganz gut geschlagen.
Deutlich besser als Videokonferenzsysteme
Alles in allem kann ich trotz einiger Nachteile die Nutzung von Beams definitiv empfehlen. Da die CHI nächstes Jahr wieder in den USA stattfinden wird, ist das wieder eine gute Alternative. Der Vorteil gegenüber herkömmlichen Videokonferenzsystemen ist bedeutsam, da man wirklich als Individuum wahrgenommen wird – und ich selbst auch das Gefühl hatte, mittendrin zu sein und interagieren zu können. Ein tolles Gefühl. Natürlich wurde mir mehr Aufmerksamkeit als sonst zuteil, aber sobald dieser Neuartigkeitseffekt vorüber ist, dürfte es wohl selbstverständlich werden, mit einem Roboter zu reden – da am anderen Ende auch „nur“ ein Mensch ist, der nicht physisch vor Ort sein kann.
→ Autor: Dr. Athanasios Mazarakis (Wissenschaftlicher Mitarbeiter und Post-Doktorand, ZBW-Leibniz-Informationszentrum Wirtschaft, Christian-Albrechts-Universität zu Kiel)


Department versus Lehrstuhl: Könnte Open Science profitieren?

Forschungsdatenmanagement: Werkzeugkasten für erfolgreiche institutionelle Angebote

Öffnung der Wissenschaft: So wird die Bibliothek zum Hub für Open Innovation und Science
View Comments

Barcamp Science 2.0: Open Science in der Praxis? Einfach anfangen!
Offen, innovativ und wissbegierig – so könnten die Teilnehmenden und auch die...